



-1200.webp)
This product is built to order
This kit helps you to understand all the fundamentals of Control Moment Gyroscopes.
You will still need to understand the theory, but this will enable you to put it into practice quickly.
What was once a niche market is now increasingly taught due to the growth in microsats.
This kit is aimed at aerospace students/engineers, robotics students and uber-geeks!
Rotating a spacecraft in space can only be achieved in two ways (3 ways with reaction wheels). Firstly thrusters (small rocket motors) that are positioned at points around the spacecraft can be briefly fired to rotate the spacecraft. This has the drawback of using some propellant which will eventually be used up. This clearly needs careful planning as any extra weight on a spacecraft by its very nature is inhibitively expensive. It also means that the thrusters are used only when necessary as it will reduce the spacecraft’s life (assuming it can’t be refuelled) or at huge cost (if it can be refuelled).
The second solution is to use a Control Moment Gyroscope (CMG). This is one or more gyroscopes that are forcibly rotated using an electric motor. The resulting gyroscope torque rotates the spacecraft. Up to 3 axes can be controlled this way. Extra gyroscopes can be used for redundancy. The benefits are clear; Provided the spacecraft has electrical power, by solar power for example, then the aircraft can rotate. With a CMG this can be gone on a regular basis or simply used consistently to keep the spacecraft pointing in the same direction.
Control moment gyroscopes have been used with great effect on the International Space Station, Hubble space telescope and many satellites.
Although most are used exclusively in space there is actually no reason they cannot be used for some interesting earth bound projects.
This kit allows anyone to understand all the fundamentals of Control Moment Gyroscopes.
 |
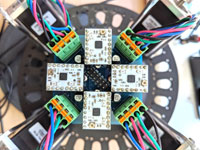
Carbon fibre chassisWith the Mk2 version of CMG platform the aluminium chassis is replaced with a 3D printed carbon fibre infused chassis. This makes it rigid, light and allows for the complex shape. The gyroscopes can be placed at 15 degree angles around the chassis. This allows 2, 3 and 4 gyroscopes to be eveningly spaced and allows numerous configurations. |
|||
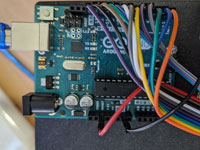 |
Arduino poweredEach gyroscope has a controller and each stepper motor is driven independently. Control of the whole system is through an Arduino micro-controller which is fully programmable using USB. The system is fully programmable and the source code is included. The Arduino programming IDE is available for Windows, Mac and Linux here |
|||
 |
JoystickAn analogue joystick is included for simple control of the platform. Simple software has been written for the Arduino to convert into platform movements. It is envisaged that students will expand, refine and provide great precision to the control. | |||
 |
Stronger stepper motorsThe Mk2 platform replaces the high torque servos (that could often jitter) for more precise, higher torque stepper motors that give absolute positioning. The steppers can also give more than 360 degree rotation if needed. | |||
 |
Custom PCBA custom PCB motherboard has been designed to rationalise and simplify the complex wiring. Industry standard daughter boards are used to control the stepper motors. | |||
 |
Aluminium modular partsThe 4 CMGs are made from aluminium modular parts. That allow different angles giving plenty of options for CMG positioning. | |||
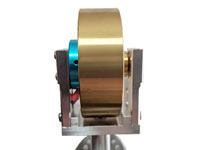 |
Larger, stronger, more powerful gyroscopesThe Mk1 used super gyroscopes. The Mk2 now has larger, much heavier brass gyroscopes with more stable, predictable RPMs. This gives much higher gyroscopic torques, more than offsetting any weight increases by heavier stepper motors etc. | |||
 |
Power supply includedA high current stable switch mode power supply is included. The power supplies are over specified to ensure voltage is ensured. It provides 24 Volt 15 Amp DC supply and 5 Volt 20 Amp DC supply. In total 460 watts for peak power. |
Uses and benefits
- Useful for small satellites and microsats teaching
- Ideal for teaching students CMGs
- Allows numerous simulations, including CMG failure
- Unique uses in robotics
- Useful in the fields of Robotics, Aerospace, High altitude balloons and possibly photography
- Maybe of interest to niche market RC aircraft
Key features
- Supplied 4 electric powered Control moment gyroscopes
- Gyroscopes have internal BLDC style motors.
- Nema 17 Bipolar Stepper motors provide 45Ncm (64oz.in) of torque
- Steppers have native 1.8deg step angle
- Stepper controller is set to 1/4 step. Hence 0.45 step. Or 800 pulses per 360 degrees
- 3 or 4 gyroscopes can be used (more or less can be added/removed if needed)
- Gyroscopes can be placed at 15 degree angles on the platform.
- Simple gimbal allows movement in 3 axes (Pitch, Roll, Yaw) using SKF plain bearing.
- All gyroscopes have a stable RPM each having their own controller
- Each CMG is rotated using strong stepper motors. Provides precise small movements.
- Each CMG can be controlled independently
- High current switch mode power supplies are included
- Joystick supplied to control platform
- Joystick allows pitch, yaw and roll movements
- Controller is an arduino (programmable using USB)
- Simple control software for the arduino is supplied
- Gimballed stand for platform is included
- Provided source code includes single, double and triple Exponential Moving Average filters.
Mk2 improvements
- Heavier, larger gyroscopes
- Structure is more rigid
- Servos replaced with much stronger, more precise stepper motors
- Much higher levels of torque can be provide
- Each gyroscope now has its own speed controller
- Gyroscope speeds are more stable
- Controller is now a widely used arduino
- Now includes a stand
- Joystick included.
To DOWNLOAD the Arduino Source code click here
FAQ
What is the orientation of each CMG on the platform, and what can be done to reconfigure these orientations?
The platform has quite a complex design for mounting points at 15 degrees. Allowing 3 gyros to be place equally apart and 4 gyros can also be placed equally apart. The gyros can also be tilted at 15 degree angles from 0 to 90 degrees.
How is the platform suspended or mounted to the ground?
The mk2 CMG platform now has a stand. It is gimballed allowing it pitch, yaw and roll.
How is power supplied?
The controllers need a stable voltage and high amperage. It comes with its own mains powered transformer.
Is there likely to be any design changes
Yes at the moment the power supply box and controller box are separate. I tend to combine these for future builds.